



After a stunning victory in SOP class, at the 2018 Pumpkin Run of the Northeast Rally Club, Sue & John Corey were asked to spill their secrets. How is it possible to do well at TSD rally without even a stopwatch, much less an accurate rally speedometer (the winning ride was a stock 2004 Jaguar XJR, with a 170 mph speedometer, so almost all rally was done in less than 30 degrees of needle swing, in the lower left bit of the dial!). So here it is, the whole magical technique, for your rally enjoyment.
Secret Fact #1: except in long-distance, cross-country rally, the precision of holding steady speeds isn’t that important (or that difficult). In fact, errors tend to average out, so there’s no real secret here. Just stay more-or-less on speed, and do not try to secretly correct off-speed dwells by casually running the other way off for a while. You will soon enough make an error in the other way anyhow, so added uncalibrated reactions only compound accumulated errors.
Secret Fact #2: It’s all about corners and stop-starts. It’s at these speed change points where the game is won or lost. And cornering is just a special case of stop-start. This is the area where we may have a useful technique for doing well, and this article will explain that in detail.
Secret Fact #3: Error is unavoidable, so correction is essential and must be done in a controlled manner to minimize added or residual error. Here, the technique is well known, but perhaps not always employed in the field, so this article will briefly review this process.
Secret Fact #4: The running tally. This is really a synthesis of #1, 2, and 3, but it’s key to overall error control. More on this simple method below.
Secret Fact #5: It’s all for fun, anyway. Like any challenging and competitive activity, TSD rally can get the adrenalin up and the nerves can get jangled. That’s rarely helpful. Also, if you happen to be running with a spousal unit, it’s NEVER helpful. Relax. Have fun.
STOP-STARTs and the Special cases for Cornering speed loss.
It helps to have a table that tells how long your car takes to get to speed and to stop from speed, but – SURPRISE! – it’s not necessary. Instead, the method of carrying error will do the trick. Here’s how. Let’s say the instructions call for a stop of 15 seconds, between approach at 40 mph, and exit at 20 mph. For most cars, used as in normal driving, these speeds require about one second per 10 mph to reach or burn off. That is, it will take about 4 second to stop from 40, and about 2 seconds to accelerate to 20. Just knowing this, we can estimate how long to wait at a stop. For this 15 second instruction with 40 in and 20 out, we can estimate that the stop time should be 15 minus half the change times (that is stop time estimate = 15 – (4+2)/2 = 12 seconds.
The navigator’s job is to do this figuring in advance, to know how long to hold the stop and call the release when it’s time to go again. This can be done as easily as counting off the hold seconds out loud (“twelve thousand, ‘leven thousand, ten thousand, nine thousand..,” and so on to zero, when the driver takes off again). Also, the navy must start the stopwatch (or mark the big clock) when the driver first calls the slowing “Mark1” and stop the stopwatch (or mark the big clock) at the second, accelerating “Mark!” The time elapsed SHOULD match the instruction’s stop time (but it won’t – see below).
The driver’s job, during the decel and accel is to call out (“Mark!”) as the speedo shows the car passing through the halfway point in each process. In the example above, while slowing from 40 to zero, the driver would call out at 20, and while accelerating from zero to 20 would call out at 10. As the figure below shows, the time between these two marks should equal to the ideal instant stop-start time that the instructions describe (but it won’t – see below).
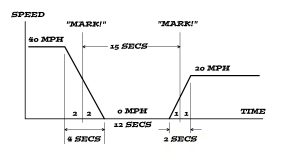
the ideal stop-go in a rally
BUT…
What if the driver doesn’t slow and speed up at that assumed rate?
What if the navigator estimated the hold time incorrectly?
What if traffic forces an extra delay or the driver decides to go early to avoid traffic?
What if any of these or a host of other possibilities make the mark-to-mark time not equal to the instructed stop time?
Now here’s the magic part: that doesn’t have to be any more exact than this, because there is a way to track and continually refine and reduce the residual error. The navigator writes the error in the right-hand margin of the instructions, and adjusts the next hold time accordingly. Say that in the example above, the mark-to-mark time is 13 seconds, not the target of 15. The navigator writes -2 in the margin and looks ahead to the next timed stop. Say that next one is specified in the instructions as 20 mph in, again 15 second stop, and 40 mph out. The normal deduct would be 3 seconds ((20+40)/2 = 3). But because we’re already at -2, we would only deduct one more, holding for 14 seconds. Again, the driver calls Marks, and again the navigator tracks that interval and counts down the stop seconds. In this way, each error is fixed by the next event, keeping the total error small.
Of course, if there is a large error, more than about 10 seconds, it cannot be fully corrected in this way, it is still necessary to make either a larger correction by overspeed (method described below) or take a time delay request. Time delay submissions are self-explanatory, but we can offer a simple rule for making error adjustments too large to carry (or for corrections when a checkpoint might appear before the next stop!).
For every second late, run 10% faster for 10 seconds (30 -> 33, 40 -> 44, etc.). In other words, you gain 1 second for every 10 you go overspeed.
For every second too early, run 10% slower for 10 seconds. (30 -> 27, 40 -> 36, etc.). In other words, you lose 1 second for every 10 you go underspeed.
That will cover most cases, but what if you’re way off and want a faster correction (and the road allows it safely)?
For every second late , run 20% faster for 5 seconds (30->36, 40->48, etc.). In other words, you gain 1 second for every 5 you go overspeed.
For every second too early, run 20% slower for 5 seconds (30->24, 40->32, etc.). In other words, you lose one second for every 5 you go underspeed.
These two adjustment rates will cover almost all cases. As with stop-starts, the navigator calls the event “let’s make up 5 seconds at 10% over now.” The driver calls “Mark!” halfway from the nominal speed to the correction speed. The navigator begins timing (stopwatch or count-off). The driver calls “Mark!” again midway down to the nominal after the required correction time is done. Don’t worry that the driver misses calling the second “Mark!” at the exact moment when the count is done. This error is very small indeed (a fraction of a second at a mere 10% speed variance!). And that’s it! For stop-starts, anyway.
Then, there are corners…. Corners usually have speed changes like a stop-start, but do not have a specified stopped time. The instructions presume speed change is smooth and centered on the corner. Sometimes, you can do that. For instance, 30 in and 20 out is almost always achievable, even on a sharp 90-degree turn, by slowing through 25 mph at the corner’s apex. And sometimes, the turn is a mild one, more of a light bend, and those can usually be handled with the same smooth transition. In each of these cases, the driver should ‘call’ the corner, indicating it will be handled this way and the navigator need make n corrections for lost time.
On the other hand, a corner from 30 mph and exiting at 50 again will not be safely handled by powersliding through with a mid-corner speed of 40! These we treat as stops! Yes, the driver calls a stop-start event (OK, likely the navigator has anticipated this in many cases, just from the instructions, but the driver should ALWAYS call intent). Then, choosing the safest spot for a full stop, the driver decelerates to zero, calling “Mark!” halfway down, and as soon as the final stop jerk is felt, accelerates to the required exit speed, calling “Mark!” halfway up. The navigator tracks the time mark-to-mark (stopwatch or count-off) and exactly as with stop signs, that time is the equivalent zero-speed time and as there was no stop allowance for the corner, that stop time is fully a loss – you are now behind by exactly that many seconds more. The navigator adds the loss to the running error tally in the right hand margin, and plans how to correct it, either at the next stop or with overspeed, as described above.
The tally is the navigator’s bible! Often, the score for a leg is foretold by that tally, so keep it small, and prefer a little early over a little late (easier to nail the brakes when a checkpoint appears). With the Mark-Mark real time and adjustments, the running tally is all you need to do well! Actually winning, of course, also requires a little luck.
Thanks Dr. Roche! Yes, that would work, too, using the halfway-to-half-speed and halfway-back-up ‘Mark!’ callouts, where the lost time would be (duh!) half the time between callouts, rather than all the mark-mark time lost in the case of a full stop. On the other hand, it requires a little more mental math for the driver, who has to figure out that halfway to half of, say, 35 mph is (35+17.5)/2 = 26.25, and do so in time to see it and call it. I guess if a quick reference table were in view…
Awesome write up! I do most things similarly. One difference might be doing turns at half speed no need to come to a complete stop, and you can go to half speed any time while approaching a corner.